—— 产品展示 ——
PRODUCT—— 推荐产品 ——
RECOMMONDHKMC- X0403/X0603混合型高性能运动控制器
*6轴全闭环伺服轴+3轴振镜轴
*伺服闭环运算周期最低25us,满足直线电机等高速高性能运动控制系统的要求。
*双插补坐标系,方便伺服和振镜联动插补。坐标系0插补周期50us,坐标系1插补周期10us。
*具高速同步脉冲PSO、模拟量电压随速等激光行业常用功能。
*提供2种双驱龙门算法:主从和交叉耦合。
技术指标如下:
型号 功能 | HKMC-X0403 | HKMC-X0603 |
伺服轴数 | 4 | 6 |
振镜轴数 | 3 | 3 |
伺服轴控制方式 | 12位真DAC输出全闭环控制 | 12位真DAC输出全闭环控制 |
振镜轴控制方式 | XY2-100 | XY2-100 |
供电需求 | 直流正负12V,电流大于1.5A | 直流正负12V,电流大于1.5A |
伺服周期(us) | 25到250us可调 | 25到250us可调 |
插补周期(us) | 20us | 20us |
闭环算法 | PID+Vff+Aff+FIR | PID+Vff+Aff+FIR |
直线插补最大联动轴数 | 6轴 | 6轴 |
圆弧插补 | 2轴平面 | 2轴平面 |
速度曲线种类 | 梯形和S形两种 | 梯形和S形两种 |
一维补偿 | 本轴线性和交叉轴垂直 | 本轴线性和交叉轴垂直 |
二维补偿 | 伺服和振镜各提供一个二维补偿表 | 伺服和振镜各提供一个二维补偿表 |
双驱龙门 | 主从和交叉耦合两种方式 | 主从和交叉耦合两种方式 |
位置硬件捕捉 | 是 | 是 |
同步脉冲输出(PSO) | FPGA硬件计算输出,最高1MHz | FPGA硬件计算输出,最高1MHz |
辅助PWM高速脉冲输出 | 1路,最高10MHz | 1路,最高10MHz |
模拟量输出 | 6路12位真DAC(非PWM滤波) | 8路12位真DAC(非PWM滤波) |
模拟量输入 | 无 | 提供和AD模块通信的RS422口 |
电子齿轮 | 有 | 有 |
电子凸轮 | 有 | 有 |
RS422 | 1路 | 2路 |
CAN总线 | 无 | 无 |
数字量输入 | 34路光耦隔离 | 40路光耦隔离 |
数字量输出 | 32路光耦隔离 | 36路光耦隔离 |
前瞻连续插补 | 有 | 有 |
运动FIFO队列 | 4000行x2 | 4000行x2 |
调试软件 | HKMC Studio | HKMC Studio |
实时路径绘制功能 | 有 | 有 |
外形尺寸 | 24cm*160cm*50cm | 24cm*160cm*50cm |
控制器图片:

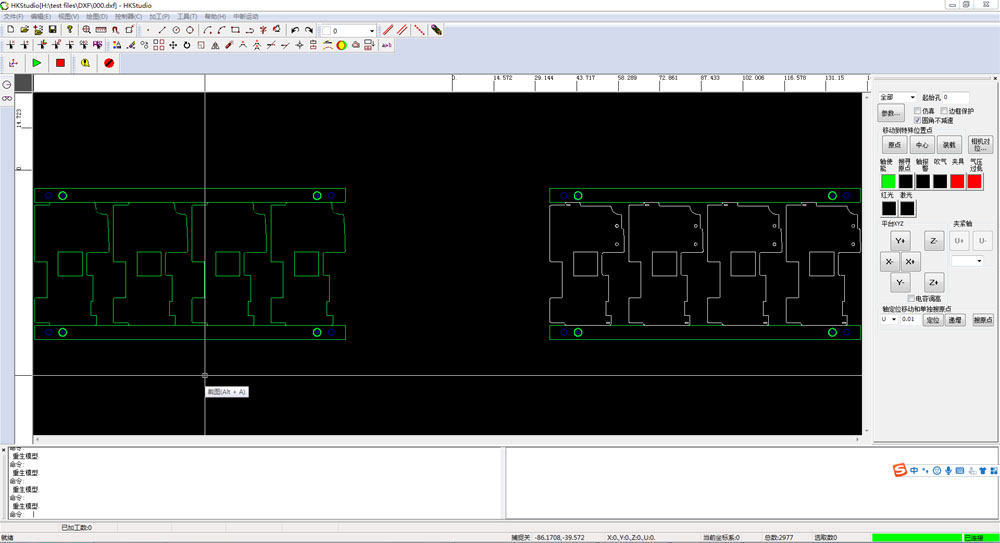
上位软件截图:



服务热线